
Neuartige künstliche Muskeln aus Silikon und mit Luftblasen bestückt lassen sich gezielt mit Ultraschall verformen und drahtlos steuern. Forschende der ETH Zürich konnten Anwendungen von einem Greifarm über einen von einem Stachelrochen inspirierten Roboter bis zu Pflastern für die Medikamentenabgabe demonstrieren. Noch handelt es sich um Laborversuche, doch die Technik eröffnet Perspektiven für Anwendungen in Robotik und Medizin.
Zürich/Switzerland, 30. Oktober 2025. – Flexible Membranen die mittels winzigen Luftbläschen auf Ultraschall reagieren bilden eine neue Klasse künstlicher Muskeln. Ein Materialexperiment hat gezeigt, ein Impuls von Ultraschall genügt damit ein dünner Streifen Silikon sich zu biegen und wölben beginnt. Zu diesem Ergebnis kam ein Wissenschaftsteam um Daniel Ahmed, Professor für akustische Robotik in Biowissenschaften und Gesundheitswesen.
Die künstlichen Muskeln werden in einer Gussform zu einer Mikrostruktur gebildet. Auf der Unterseite einer Silikonmembran sind kleinste Poren von der jede ca. 100 Mikrometer tief und breit ist. Unter Wassereinfluss füllt sich jede dieser Poren in denen sich im Anschluss die Luftbläschen einschließen.
Unter Einfluss von Schallwellen beginnen die Bläschen zu schwingen und erzeugen damit eine Strömung die zur Bewegung der Masse, dem Muskel führt. Die Steuerung funktioniert präzise in vielfältiger Weise von gleichmässiger Krümmung bis hin zu wellenförmigen Bewegungen. Auf diese Weise lassen sich die Muskeln innerhalb eines Millisekundenbereich präzise ansteuern.
In mehreren Experimenten konnte die volle Funktionstüchtigkeit des Muskels nachgewiesen werden. In einem der Fälle sollte eine Zebrafisch-Larve im Wasser behutsam mittels Miniatur-Greifarm umschlossen, dann frei gelassen werden.
„Es war faszinierend zu sehen, wie präzise und gleichzeitig sanft der Greifer funktioniert – die Larve schwamm danach unversehrt davon“, berichtet Zhiyuan Zhang, ehemaliger Doktorand bei Ahmed und einer der beiden Erstautoren der in der Fachzeitschrift Nature publizierten externe SeiteStudie.
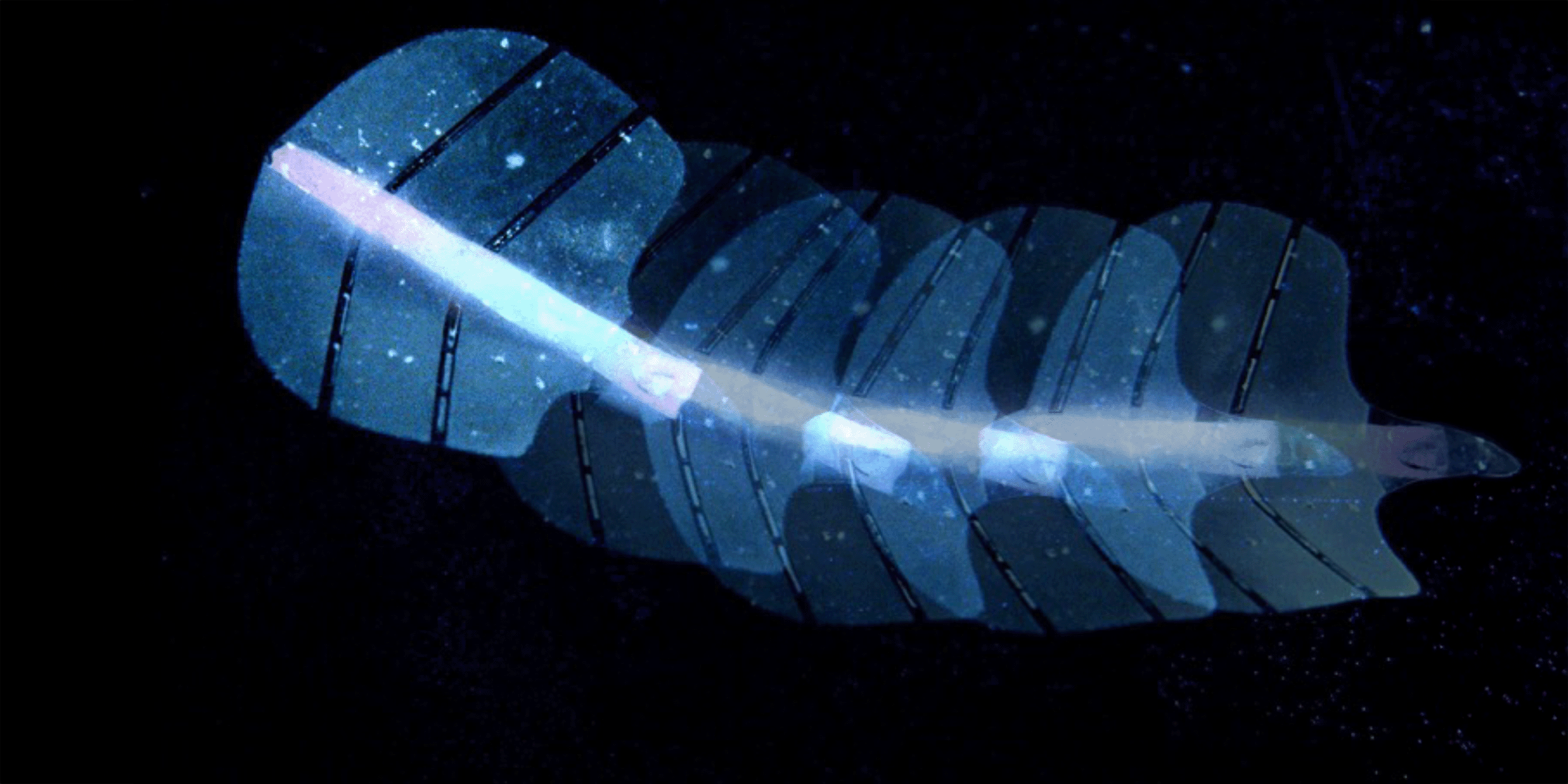
Die forschenden bauten einen Stachelrochenähnlichen Roboter nach, um damit die wellenförmigen Bewegungen zu demonstrieren. Dabei übernehmen zwei künstliche Muskeln die Funktion der Brustflossen. Bei Anregung unter Ultraschall entstanden dann die erwünschten Bewegungen und der Miniroboter glitt durchs Wasser. „Die wellenförmige Fortbewegung war für uns ein echtes Highlight“, weis Ahmed zu berichten. „Sie zeigt, dass wir mit den Bläschen nicht nur einfache Bewegungen erzeugen können, sondern auch komplexe Muster wie bei einem lebenden Organismus.“
Ein Ziel des Stingraybot-Roboters sollen die gezielte Platzierung und Freisetzung von Medikamenten im Magen-Darm-Trakt sein um minimal-invasive Eingriffe zu unterstützen. Der Roboter wird dann über eine Kapsel oral, per Schlucken eingeführt und löst sich dann im Magen auf.
Die Forscher entwickelten weiterhin Pflaster die sich mittels Ultraschallaktivierung auf gekrümmten Strukturen festhalten können. Diese Pflaster sollen sich individuell an Gewebeformen anpassen und Medikamente gezielt freisetzen, bsw. für Narben oder Tumore.
„Zuerst haben wir die Grundlagenforschung durchgeführt und dann demonstriert, wie vielseitig die künstlichen Muskeln einsetzbar sind: von der Medikamentenabgabe über die Fortbewegung im Magen-Darm-Trakt bis hin zu Pflastern am Herzen“, fasst Ahmed zusammen.
Noch bleibt es bei Laborversuchen, doch das Potenzial für künftige medizinische und technische Anwendungen ist gross. Langfristig könnten solche weichen Muskeln helfen, Medikamente präziser zu verabreichen und Eingriffe schonender zu machen. Die Kombination aus Biokompatibilität, Flexibilität und drahtloser Steuerung macht sie zu einem vielversprechenden Werkzeug für die Medizin. Für die Forschenden steht der Weg zu akustisch gesteuerten Muskeln erst am Anfang. Viele Problemlösungen haben ihren Anfang in der Medizintechnik gefunden und sich auf weitere Märkte erweitert. Analog zur Medizin gilt auch der Forschungsstand in Robotik und Künstlicher Intelligenz auf einem Novum das den Einsatz solcher Muskeltechnologien dort begünstigt.
Originalpublikation:
Shi Z, Zhang Z, Schnermann J, Neuhauss SCF, Nama N, Wittkowski R, Ahmed D: Ultrasound-driven programmable artificial muscels. Nature 2025, doi: 10.1038/s41586-025-09650-3 [https://do.org/10.1038/s41586-025-09650-3]
Weitere Informationen:
https://ethz.ch/de/news-und-veranstaltungen/eth-news/news/2025/10/neuartige-kuenstliche-muskeln-bewegen-sich-mit-schall.html
Bildquelle
Ein Stachelrochen-Roboter aus künstlichen Muskeln mit Mikroblasen, der sich mittels Ultraschalls navigieren lässt und bspw. Medikamente an den richtigen Ort bringen kann. Copyright: Shi Z et al. Nature 2025
Der Newsletter erscheint einmal pro Woche Freitags mit allen Inhalten der Woche
Schreibe einen Kommentar